Comparing low-cost 2D scanning Lidars


It’s now possible to buy small scanning 2D Lidars for less than $400 these days, which is pretty amazing, since they were as much as $30,000 a few years ago. But how good are they for small autonomous vehicles?
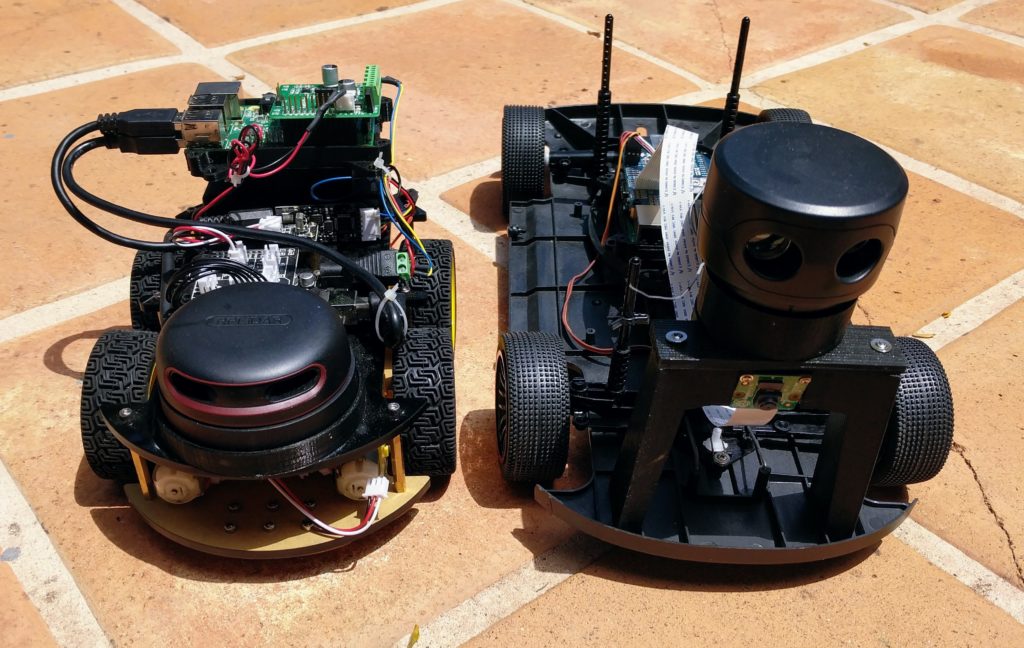
I put two to the test: the RP Lidar A2 (left above) and the Scanse Sweep (right). The RP Lidar A2 is the second lidar from Slamtec, a Chinese company with a good track record. Sweep is the first lidar from Scanse, a US company, and was a Kickstarter project based on the Lidar-Lite 3 1D laser range finder unit that was also a Kickstarter project a few years ago (I was an adviser for that) and is now part of Garmin.
The good news is that both work. But in practice, the difference between them become very stark, with the biggest being the four times higher resolution of the RP Lidar A2 (4,000 points per second, versus Sweep’s 1,000), which makes it actually useful outdoors in a way that Sweep is not. Read on for the details.
First, here are the basic spec comparisons:
| Scanse Sweep | RP Lidar A2 | |
|---|---|---|
| Samples/sec | 1000 | 4000 |
| Tested range | ~4-5m outdoors, ~12m indoors (much less than claimed range of 40m) | ~4-5m outdoors, ~14-16m indoors (much more than claimed range of 6m) |
| Scan rate | Up to 10Hz | Up to 15Hz |
| Angular resolution | 3.6 degrees | 0.9 degrees |
| Height | 2.5cm | 1.5cm |
| ROS integration | yes | yes |
| Python driver | yes | yes |
| Cost | $350 | $379 (for 2 or more), $450 (for 1) |
Bottom line: RP Lidar A2 is smaller, much higher resolution, and better range indoors (it’s notable that the real-world RP Lidar performance was above the stated specs, while the Scanse performance was below its stated specs). The Scanse desktop visualization software is better, with lots of cool options such as line detection and point grouping, but in practice you won’t use it since you’ll just be reading the data via Python in your own code. Sadly the Scanse code that does those cool things does not appear to be exposed as libraries or APIs that you can use yourself. [Update: Scanse has now released those libraries here]
In short, I recommend the RP Lidar A2.
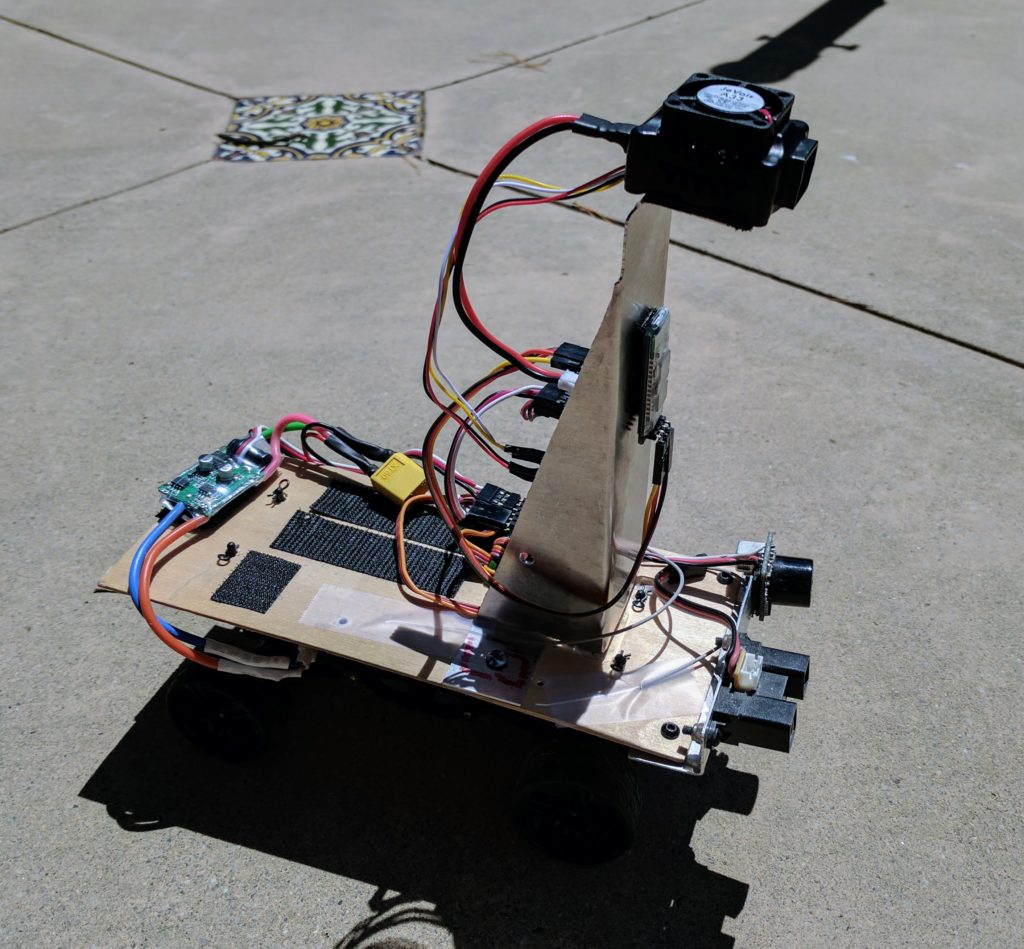
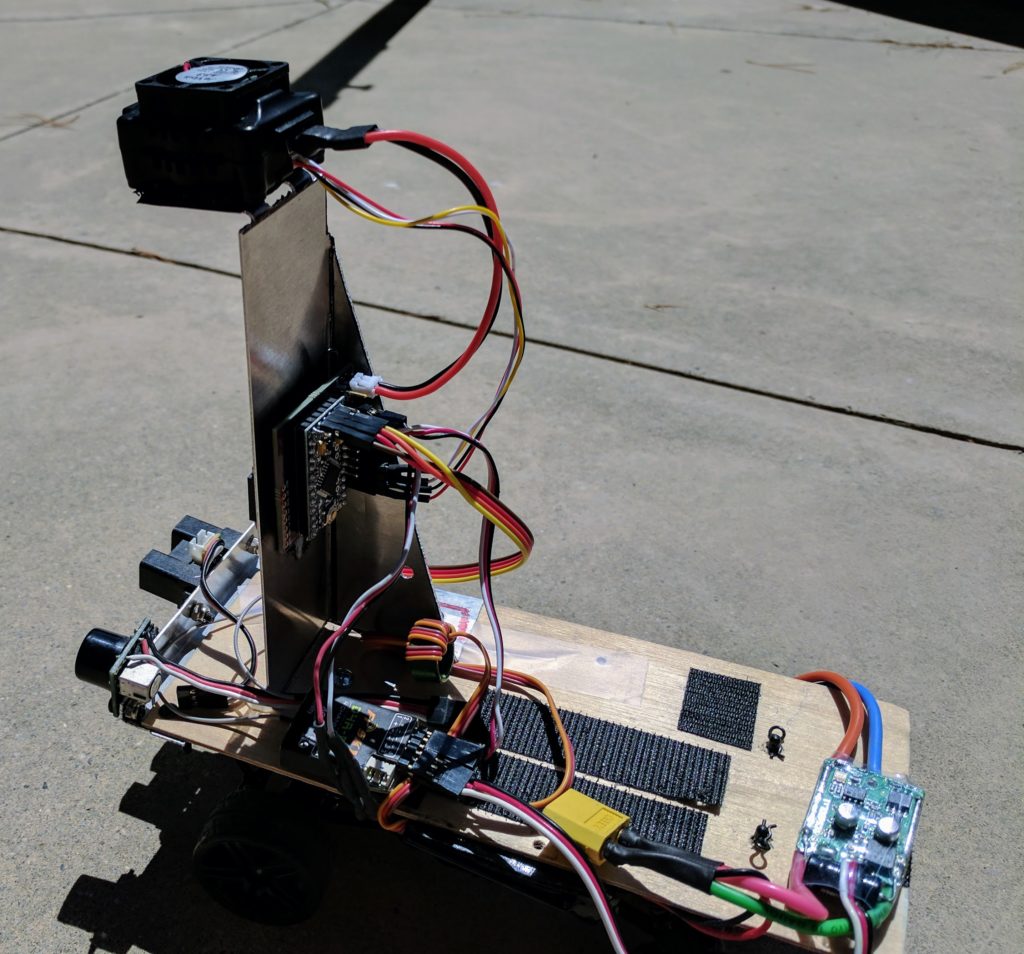
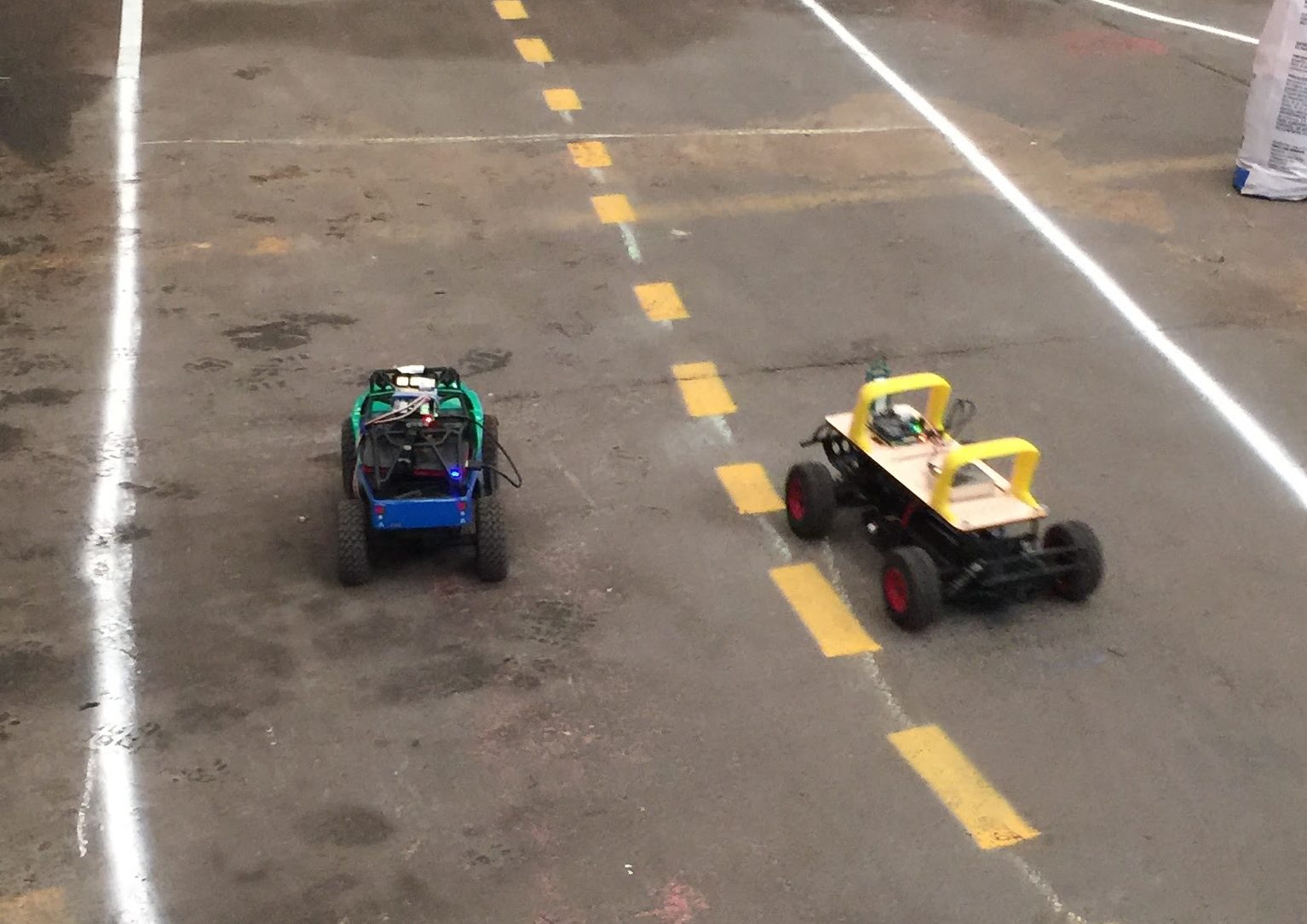
I tested them both in small autonomous cars, as shown below (RP Lidar at left). Both were tested on a sunny day for the outdoors test, in exactly the same way.
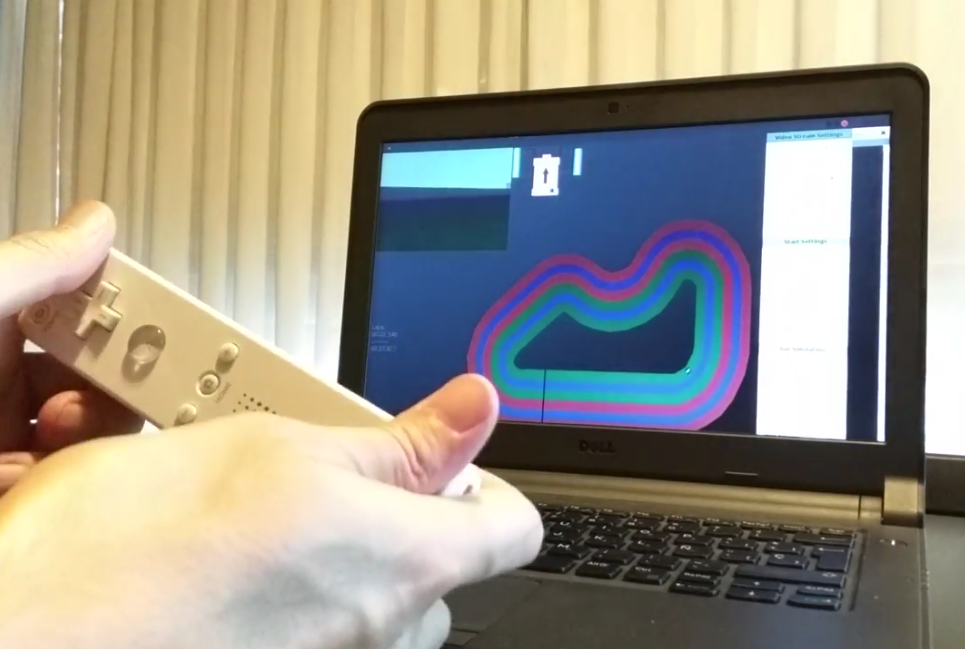
Both have desktop apps that allow you to visualize the data. Here’s a video of the the two head-to-head scanning the same room (RP Lidar is the window on the right)
You can see difference in resolution pretty clearly in that video: the RP Lidar just has four times as many points, and thus four times higher angular resolution. That means it can not only see smaller objects at a distance, but the objects it does see have four times as many data points, making it much easier to differentiate them from background noise.
As far as using them with our RaspberryPi autonomous car software, it’s a pretty straightforward process of plugging them into the RaspberryPi via the USB port (the RP Lidar should be powered separately, see the notes below) and reading the data with Python. My code for doing this is in my Github repository here. We haven’t decided how best to integrate this data with our computer vision and neural network code, but we’re working on that now — watch this space.
The one thing that seems clear is that ROS, which has support from both lidars, is probably overkill for the simple obstacle avoidance we want the lidars for in a track racing context. It’s designed for SLAM (simultaneous location and mapping), which works too slowly for racing. So we’re implementing our own lidar integration that’s designed to just spot obstacles and avoid them.
Finally although these units are amazing and the field is making tremendous progress, we still have a long way to go. Just watch the video below to put our 2D units in context. 3D lidar is astounding, and a few years from now we may see 3D solid state lidar at the same sub-$1,000 price we can now get 2D lidar for.
A few tips and additional notes:
- Yes, it’s true that a 2D scanning lidar is just a 1D range finder on a spinning platform, but DO NOT TRY TO DO THIS YOURSELF. I’ve been there, done that, and integrating the data reliably in motion is non-trivial. Pay the extra $200 and get a proper scanning one.
- For the RPLidar, to use it with a RaspberryPi, you’ll need to power it separately. It uses a 5v power and has a tiny jack. These are the plugs that fit it.
- Of course you can always buy an old Neato unit (cannibalized from their vacuum cleaners) for $120 from eBay or Amazon. They’re pretty well supported with open source code but have much lower resolution than modern units. I think their time is gone — move on the RP Lidar instead.
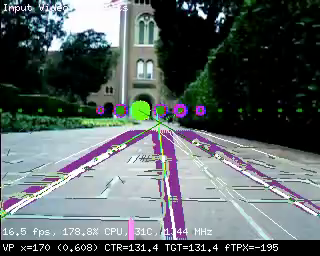
- You can use an OpenMV computer vision module as a poor man’s Lidar. Total cost: $70!
- There’s a project to convert Scanse to a full 3D spherical scanner. The scanning rate will be way too slow for motion, but you could scan a room this way.