
I backed the Naobot AI robot on Kickstarter, and actually got two of them (the first was defective, so they sent me another). So I took apart the defective one to see how it works inside. Overall, it looks very well done.
Right now it’s mostly useful as a programming platform, using Scratch in its mobile app. The built-in “AI” functions, such as follow a person or animal, don’t work very well. But on the hardware side, it’s quite impressive.
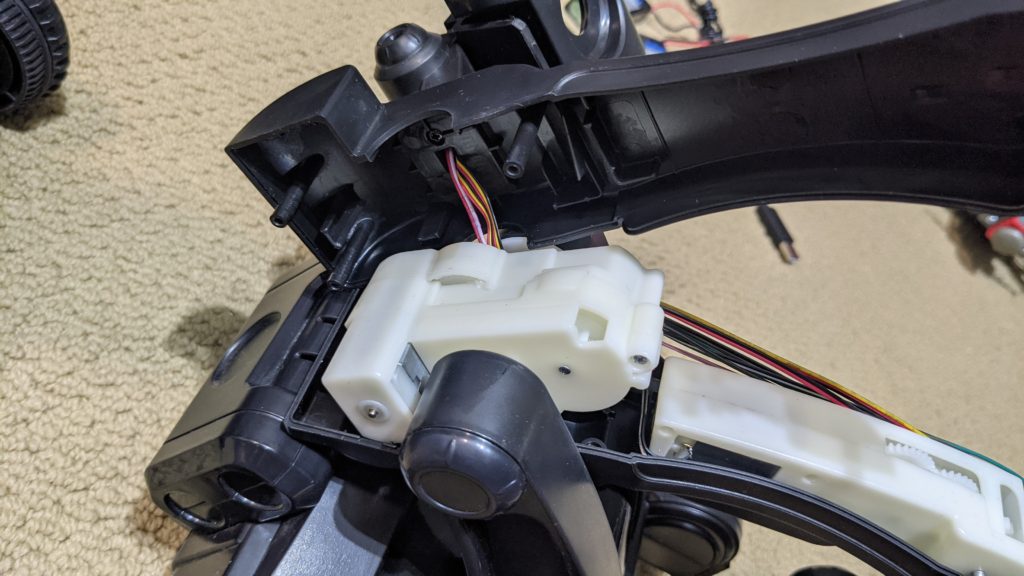
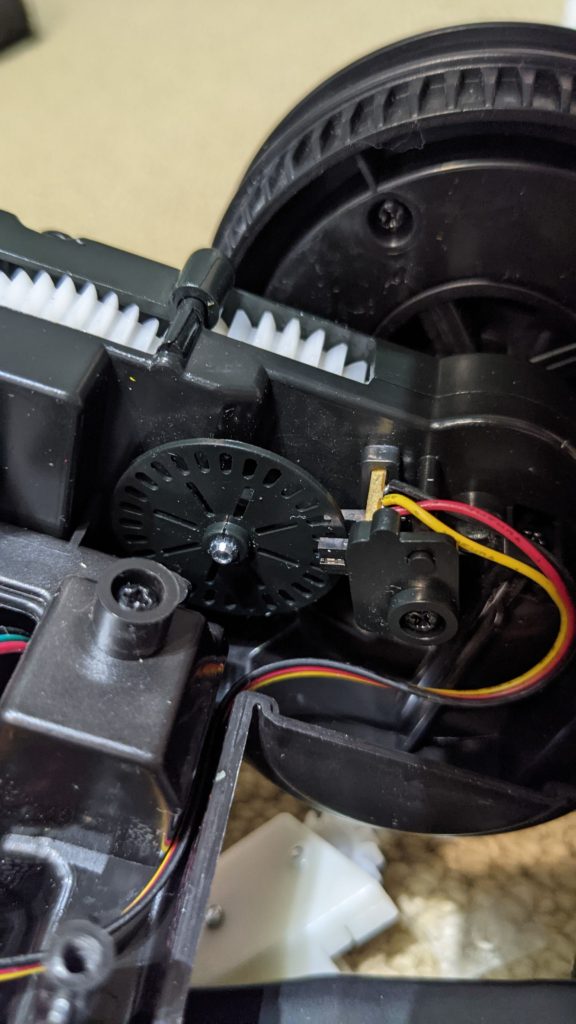
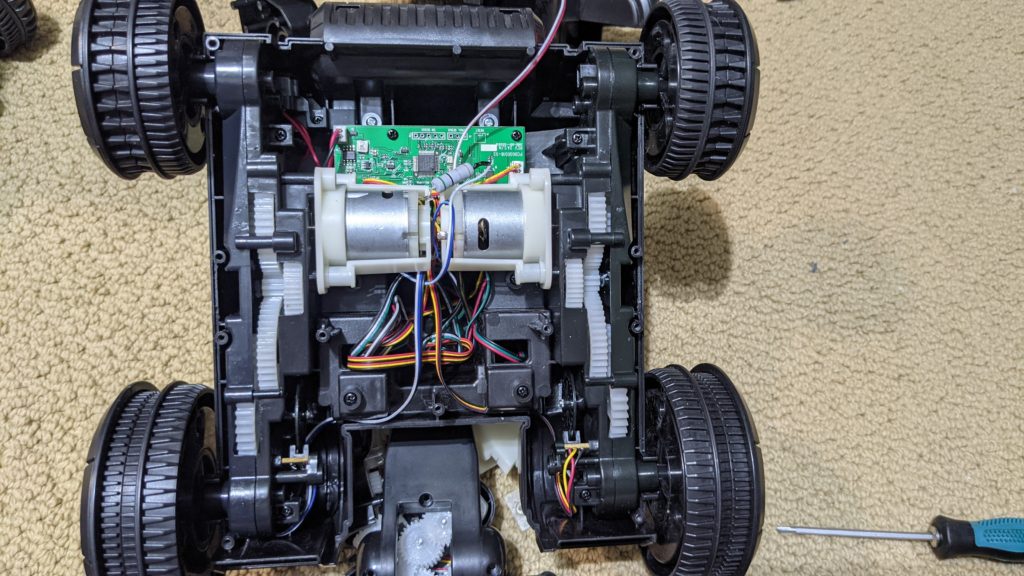
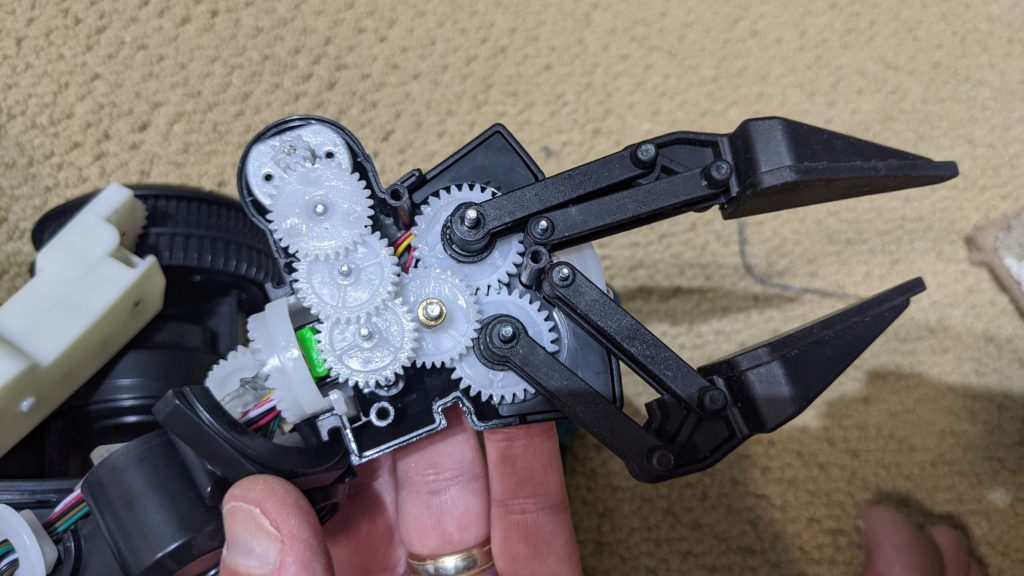
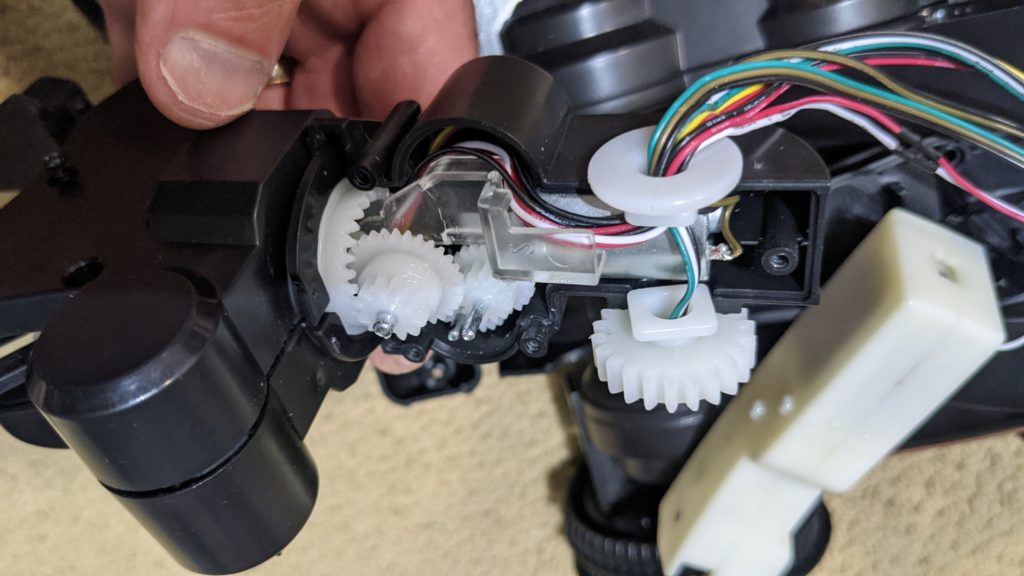
Here’s what’s inside:
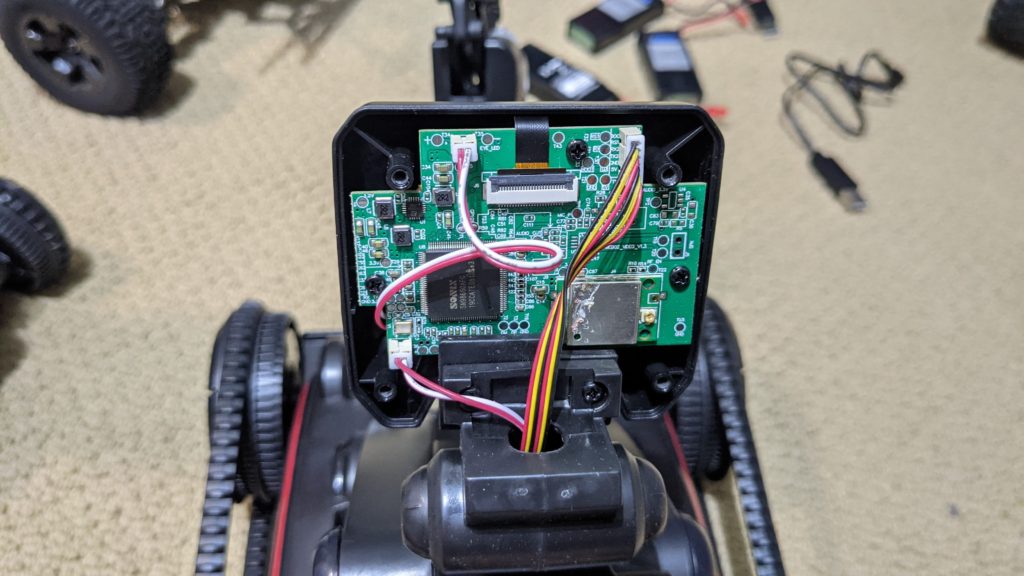
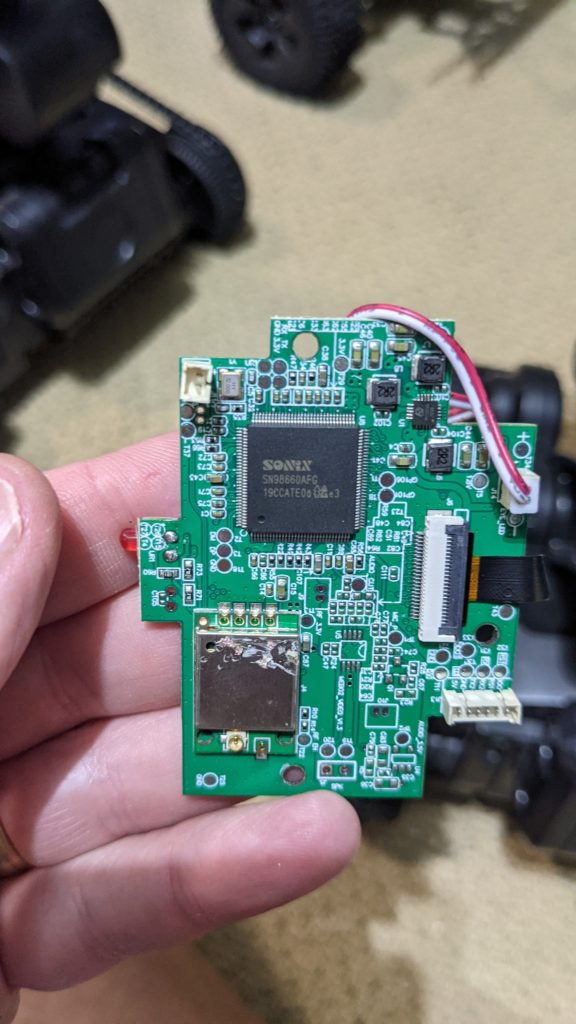
All the “brains” are in the board in the head that includes the camera, the processor and the wifi board



Im interested in doing the same project.I wanna try to reach 1 mile high!!! And fly over traffic.